import torch
import matplotlib.pyplot as plt
import matplotlib.animation
import IPython
import plotly.graph_objects as go03wk: 경사하강법, 회귀분석
![]()
1. 강의영상
2. Imports
plt.rcParams['figure.figsize'] = (4.5,3.0)
plt.rcParams['animation.html'] = 'jshtml'3. 경사하강법
A. 1차원
# 예제1 – 아래의 이차함수
\[f(x) = \frac{1}{4}(x-2)^2\]
를 최소화하는 \(x\)값을 구하여라. (편의상 답은 \(x_{sol}\)이라고 하자.)
(풀이1)
제곱의 성질을 이용하면 답은 2임을 알 수 있다. 따라서 \(x_{sol}=2\).
(풀이2)
\(f''(x) > 0\) 이므로 이 함수는 아래로 볼록한 이차함수이다. 따라서 \(f'(x)=\frac{1}{2}(x-2)=0\)를 만족하는 \(x\)가 최소값이다. 따라서 \(x_{sol}=2\)이다.
(풀이3)
가정: \(f(x)\)는 아래로 볼록한 이차함수라고 가정하자.
- 아래와 같은 알고리즘을 생각하자.
- 아무 값이나 \(x_{sol}\)이라 주장한다.
- 1에서 선택한 \(x_{sol}\)에 대해서 좌우로 조금씩 움직여보고 \(f(x)\)를 더 작게 만드는 값으로 update한다.
- 2에서 업데이트된 \(x_{sol}'\)을 다시 1의 \(x_{sol}\)이라 해석하고 1-2를 반복한다.
def f(x):
return (1/4)*(x-2)**2x_sol = 2.24
x_sol2.24f(x_sol), f(x_sol+0.1), f(x_sol-0.1)(0.014400000000000026, 0.02890000000000005, 0.0049000000000000085)x_sol = x_sol - 0.1
x_sol2.14f(x_sol), f(x_sol+0.1), f(x_sol-0.1)(0.0049000000000000085, 0.014400000000000026, 0.0004000000000000007)x_sol = x_sol - 0.1
x_sol2.04f(x_sol), f(x_sol+0.1), f(x_sol-0.1)(0.0004000000000000007, 0.0049000000000000085, 0.0009000000000000016)멈춘다. 답은 \(x_{sol}=2.04\)가 된다.
(풀이4) – 풀이3의 개선
가정: \(f(x)\)는 아래로 볼록한 이차함수라고 가정하자.
- 문제의식1: 풀이3에서.. 오른쪽으로 갈지 왼쪽으로 갈지 판단하는게 너무 힘들어…
- 문제의식2: 풀이3에서.. \(x_{sol}=2.24\)일 경우랑 \(x_{sol}=2.04\)일 경우랑 동일하게 0.1씩 움직이는게 맞는거야?
- \(x_{sol}\)의 값이 2에서 멀면 좀 성큼성큼 움직이고..
- \(x_{sol}\)의 값이 2에 가까워지면 좀 살금살금 움직이는게 맞지 않어??
# 경사하강법 아이디어 (1차원)
- 임의의 점 \(x_{sol}\)을 찍는다.
- 그 점에서 접선의기울기를 구한다. (= 그 점에서 미분계수를 구한다) 기울기의 부호를 살펴보고 부호와 반대 방향으로 움직이다. 이때 기울기의 절대값 크기와 비례하여 보폭(=움직이는 정도)을 조절한다. 조절값은 \(\alpha\)임. 따라서 업데이트하는 수식은 아래와 같다. \[x_{sol} \leftarrow x_{sol} - \alpha \times f'(x_{sol})\]
- 반복한다.
x_sol = 2.23
x_sol2.23alpha = 1.00
slope = (1/2)*(x_sol-2)
x_sol = x_sol - alpha*slope
x_sol2.115- 시각화
x = torch.linspace(1.7,2.3,100)
plt.plot(x,f(x))
#초기설정값
alpha = 1.00
x_sol = 1.7
plt.plot(x_sol, f(x_sol),'o')
# # 1회 update
slope = (1/2)*(x_sol-2)
x_sol = x_sol - alpha*slope
plt.plot(x_sol, f(x_sol),'o')
# 2회 update
slope = (1/2)*(x_sol-2)
x_sol = x_sol - alpha*slope
plt.plot(x_sol, f(x_sol),'o')
# 3회 update
slope = (1/2)*(x_sol-2)
x_sol = x_sol - alpha*slope
plt.plot(x_sol, f(x_sol),'o')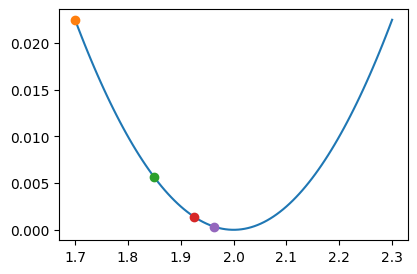
- 반복연산
alpha = 1.00
x_sol = 2.23
for dummy in range(30):
slope = (1/2)*(x_sol-2)
x_sol = x_sol - alpha*slope
x_sol2.000000000214204- 애니메이션
Code
def make_ani(alpha=0.1, initial_value=2.23, n_iterations=5):
"""
Gradient descent visualization
Parameters:
- alpha: learning rate
- initial_value: initial x value (single number)
- n_iterations: number of iterations
"""
# Calculate trajectory
x_sol_trace = [initial_value]
slopes = []
for i in range(n_iterations):
slope = 1/2*(x_sol_trace[i]-2)
slopes.append(slope)
x_sol_trace.append(x_sol_trace[i] - alpha*slope)
x_sol_trace = torch.tensor(x_sol_trace)
y_trace = f(x_sol_trace)
# Setup plot
fig = plt.figure()
ax = fig.gca()
# Fixed x range
x_min, x_max = 1.65, 2.35
# Plot function curve
x_range = torch.linspace(x_min, x_max, 100)
ax.plot(x_range, f(x_range), 'k-', linewidth=1.5)
ax.set_xlim([x_min, x_max])
ax.set_xlabel('x')
ax.set_ylabel('f(x)')
ax.grid(True, alpha=0.3)
ax.axhline(y=0, color='k', linewidth=0.5)
# Initialize current point and previous points
point, = ax.plot([], [], 'o', color='black', markersize=6)
prev_points, = ax.plot([], [], 'o', color='gray', markersize=6, alpha=0.5)
# Store arrows
slope_arrows = []
shift_arrows = []
# Create legend handles (will be updated in animation)
from matplotlib.patches import Patch, FancyArrowPatch
slope_patch = Patch(color='red', label='slope: --')
shift_patch = Patch(color='blue', label='shift: --')
legend = ax.legend(handles=[slope_patch, shift_patch], loc='upper center', fontsize=9)
def animate(frame):
nonlocal slope_arrows, shift_arrows, legend
# Remove all previous arrows
for arrow in slope_arrows:
arrow.remove()
for arrow in shift_arrows:
arrow.remove()
slope_arrows = []
shift_arrows = []
idx = frame
# Update current point position
point.set_data([x_sol_trace[idx]], [y_trace[idx]])
# Update previous points (all points before current)
if idx > 0:
prev_points.set_data(x_sol_trace[:idx], y_trace[:idx])
else:
prev_points.set_data([], [])
if idx < len(slopes):
current_x = x_sol_trace[idx].item()
slope_val = slopes[idx]
shift = - alpha * slope_val
# Get y-axis limits for proper arrow sizing
y_min, y_max = ax.get_ylim()
y_range = y_max - y_min
# Slope arrow: slightly above x-axis using FancyArrowPatch
y_slope = y_min + y_range * 0.08
slope_arrow = FancyArrowPatch((current_x, y_slope),
(current_x + slope_val, y_slope),
arrowstyle='->',
color='red',
lw=1.5,
mutation_scale=12,
zorder=5)
ax.add_patch(slope_arrow)
slope_arrows.append(slope_arrow)
# Shift arrow: below slope arrow using FancyArrowPatch
y_shift = y_min + y_range * 0.03
shift_arrow = FancyArrowPatch((current_x, y_shift),
(current_x + shift, y_shift),
arrowstyle='->',
color='blue',
lw=1.5,
mutation_scale=12,
zorder=5)
ax.add_patch(shift_arrow)
shift_arrows.append(shift_arrow)
# Update legend with current values
legend.remove()
slope_patch = Patch(color='red', label=f'slope: {slope_val:.4f}')
shift_patch = Patch(color='blue', label=f'shift (-α×slope): {shift:.4f}')
legend = ax.legend(handles=[slope_patch, shift_patch], loc='upper center', fontsize=9)
return [point, prev_points]
ani = matplotlib.animation.FuncAnimation(
fig, animate, frames=n_iterations+1, blit=False, repeat=True
)
plt.tight_layout()
plt.close()
return animake_ani(alpha=1.0,initial_value=2.23) # alpha는 학습률 혹은 stepize 이라고 부름.- alpha가 작을수록 천천히 최소값으로..
- alpha가 커지면 빠르게 최소값으로..
- alpha가 더 커지면 진동하면서 최소값으로 갈수도있음.
- alpha가 더 더 커지면 최소값으로 가지 못하고 진동만 할수도 있음.
- alpah가 더 더 더 커지면 진동하면서 발산하는 경우도 있음.
(풀이5)
- 풀이4의 비판: 솔직히 아래의 코드에서 slope = (1/2)*(x_sol-2) 를 칠 수 있는건 불가능할수도 있지 않나??
alpha = 1.00
x_sol = 2.23
for dummy in range(30):
slope = (1/2)*(x_sol-2) # f'(x) = 1/2*(x-2)
x_sol = x_sol - alpha*slope
x_sol- slope 를 근사시키는 방식
\[f'(x_{sol}) \approx \frac{f(x_{sol}+h)-f(x_{sol})}{h}\]
def f(x):
return (1/4)*(x-2)**2alpha = 1.00
x_sol = 2.8
for dummy in range(30):
slope = (f(x_sol + 0.01) - f(x_sol))/0.01
x_sol = x_sol - alpha*slope
x_sol1.9950000007497146#
B. 2차원
# 예제2 – d아래의 함수를 최소화하는 \((x,y)\)값을 구하여라.
\[f(x,y)=(x-2)^2 + (y-3)^2\]
(풀이)
\(f(x,y)\)는 아래로 볼록한 모양이라고 가정한다.
- 그래프를 확인해보자.
Code
def plot_surface_3d(f, z_min=-500, z_max=500, x_range=None, y_range=None, n_points=800):
# 최솟값/최대값 존재 여부 판단
has_min, has_max = False, False
# 최소 탐색
p_min = torch.zeros(2, requires_grad=True)
opt_min = torch.optim.Adam([p_min], lr=0.1)
for _ in range(1000):
opt_min.zero_grad()
f(p_min[0], p_min[1]).backward()
opt_min.step()
# 수렴했으면 최솟값 존재 (발산 = 큰 좌표)
if abs(p_min[0].item()) < 1e4 and abs(p_min[1].item()) < 1e4:
has_min = True
# 최대 탐색
p_max = torch.zeros(2, requires_grad=True)
opt_max = torch.optim.Adam([p_max], lr=0.1)
for _ in range(1000):
opt_max.zero_grad()
(-f(p_max[0], p_max[1])).backward()
opt_max.step()
if abs(p_max[0].item()) < 1e4 and abs(p_max[1].item()) < 1e4:
has_max = True
if has_min or has_max:
# 최소 또는 최대가 있으면 → 기존 적응적 탐색
if has_min:
cx, cy = p_min[0].item(), p_min[1].item()
else:
cx, cy = p_max[0].item(), p_max[1].item()
n_search = 100
half = 1.0
max_half = 50.0
for _ in range(20):
if half > max_half:
break
x_s = torch.linspace(cx - half, cx + half, n_search)
y_s = torch.linspace(cy - half, cy + half, n_search)
Xs, Ys = torch.meshgrid(x_s, y_s, indexing='ij')
Zs = torch.zeros(n_search, n_search)
for i in range(n_search):
for j in range(n_search):
Zs[i,j] = f(Xs[i,j], Ys[i,j])
mask = (Zs > z_min) & (Zs < z_max)
if not mask.any():
half *= 2
continue
edge = mask[0,:].any() | mask[-1,:].any() | mask[:,0].any() | mask[:,-1].any()
if not edge:
break
half *= 2
x_in = Xs[mask]
y_in = Ys[mask]
margin_x = (x_in.max() - x_in.min()) * 0.1
margin_y = (y_in.max() - y_in.min()) * 0.1
x_lo, x_hi = x_in.min().item() - margin_x, x_in.max().item() + margin_x
y_lo, y_hi = y_in.min().item() - margin_y, y_in.max().item() + margin_y
# 주기성 감지
def detect_period_1d(f_1d, t):
d = f_1d[1:-1]
minima = ((d < f_1d[:-2]) & (d < f_1d[2:])).nonzero().squeeze()
if minima.dim() == 0 or minima.numel() < 2:
return None
dt = (t[1] - t[0]).item()
diffs = (minima[1:] - minima[:-1]).float() * dt
return diffs.median().item()
n_period = 500
scan_r = 20.0
tx = torch.linspace(cx - scan_r, cx + scan_r, n_period)
ty = torch.linspace(cy - scan_r, cy + scan_r, n_period)
fx_slice = torch.tensor([f(tx[i], torch.tensor(cy)).item() for i in range(n_period)])
fy_slice = torch.tensor([f(torch.tensor(cx), ty[i]).item() for i in range(n_period)])
px = detect_period_1d(fx_slice, tx)
py = detect_period_1d(fy_slice, ty)
if px is not None:
x_lo, x_hi = cx - px * 2, cx + px * 2
if py is not None:
y_lo, y_hi = cy - py * 2, cy + py * 2
else:
# 최소도 최대도 없으면 → 고정 범위
x_lo, x_hi = -10, 10
y_lo, y_hi = -10, 10
# 수동 범위 지정 시 덮어쓰기
if x_range is not None:
x_lo, x_hi = x_range
if y_range is not None:
y_lo, y_hi = y_range
# D 위에서 f 재계산
x_vals = torch.linspace(x_lo, x_hi, n_points)
y_vals = torch.linspace(y_lo, y_hi, n_points)
X, Y = torch.meshgrid(x_vals, y_vals, indexing='ij')
Z = torch.zeros(n_points, n_points)
for i in range(n_points):
for j in range(n_points):
Z[i,j] = f(X[i,j], Y[i,j])
# D 영역의 실제 z 범위로 재설정
z_valid = Z[(Z >= z_min) & (Z <= z_max)]
if z_valid.numel() > 0:
z_min = z_valid.min().item()
z_max = z_valid.max().item()
# D 밖은 NaN → 안 그림
Z_plot = Z.clone().float()
Z_plot[(Z < z_min) | (Z > z_max)] = float('nan')
z_margin = (z_max - z_min) * 0.05
Xn, Yn, Zn = X.numpy(), Y.numpy(), Z_plot.numpy()
fig = go.Figure(data=[go.Surface(
x=Xn, y=Yn, z=Zn,
colorscale='Viridis', opacity=0.9, showscale=False,
contours={'z': {'show': True, 'usecolormap': True,
'project': {'z': True}}}
)])
fig.update_layout(
scene=dict(
xaxis=dict(title='x', backgroundcolor='rgba(230,230,230,1)',
gridcolor='rgba(80,80,80,0.2)', showbackground=True),
yaxis=dict(title='y', backgroundcolor='rgba(230,230,230,1)',
gridcolor='rgba(80,80,80,0.2)', showbackground=True),
zaxis=dict(title='z', backgroundcolor='rgba(230,230,230,1)',
gridcolor='rgba(80,80,80,0.2)', showbackground=True,
range=[z_min - z_margin, z_max + z_margin]),
camera=dict(eye=dict(x=1.5, y=1.5, z=0.8)),
),
width=750, height=750,
margin=dict(l=0, r=0, t=0, b=0),
paper_bgcolor='rgba(0,0,0,0)',
)
fig.show()def f(x,y):
return (x-2)**2 + (y-3)**2#plot_surface_3d(f)- 차원이 높아져서 당환스럽지만, 아래의 방식으로 알고리즘을 설계하면 최소값을 잘 찾을 것 같다.
- 아무값이나 \(x_{sol},y_{sol}\)이라 주장한다.
- 1에서 선택한 \((x_{sol},y_{sol})\)근처의 값을 조사한다. 즉 아래의 값들을 조사한다.그리고 가장 \(f(x,y)\)를 작게만드는 값으로 update를 함.
- \((x_{sol},y_{sol}-0.1)\)
- \((x_{sol}-0.1,y_{sol}-0.1)\)
- \((x_{sol}+0.1,y_{sol}-0.1)\)
- \((x_{sol},y_{sol})\)
- \((x_{sol}-0.1,y_{sol})\)
- \((x_{sol}+0.1,y_{sol})\)
- \((x_{sol},y_{sol}+0.1)\)
- \((x_{sol}-0.1,y_{sol}+0.1)\)
- \((x_{sol}+0.1,y_{sol}+0.1)\)
- 2에서 업데이트된 \((x_{sol}',y_{sol}')\)을 다시 1의 \((x_{sol},y_{sol})\)로 해석하고 1-2를 반복한다.
- 위의 방식과 다르지만 아래의 방식도 가능할 것 같다.
- 아무값이나 \(x_{sol},y_{sol}\)이라 주장한다.
- 1에서 선택한 \((x_{sol},y_{sol})\)에 대하여 다음을 수행한다.
- \(f(x_{sol}-0.1, y_{sol}), f(x_{sol},y_{sol}), f(x_{sol}+0.1,y_{sol})\)를 비교하여 \(x\)의 이동방향을 결정한다.
- \(f(x_{sol}, y_{sol}-0.1), f(x_{sol},y_{sol}), f(x_{sol},y_{sol}+0.1)\)를 비교하여 \(y\)의 이동방향을 결정한다.
- 결정된 방향으로 동시에 이동하여 \(x_{sol},y_{sol}\)을 update한다.
- 2에서 업데이트된 \((x_{sol}',y_{sol}')\)을 다시 1의 \((x_{sol},y_{sol})\)로 해석하고 1-2를 반복한다.
- 고차원일 경우?
| 차원 \(d\) | 알고리즘1 | 알고리즘2 |
|---|---|---|
| 2 | 9 | 5 |
| 3 | 27 | 7 |
| … | … | … |
| 10 | 59049 | 21 |
- 첫번째 알고리즘이 더 좋아보이긴 하는데 계산량이 너무 많아 못쓰겠음. 두번쨰 알고리즘을 쓰자.
- 0.01씩 항상 업데이트하는건 말이 되지 않으므로 최종알고리즘은 아래와 같이 다시 정리해야겠음.
# 경사하강법 아이디어 (2차원) -- 근사
- 임의의 점 \((x_{sol},y_{sol})\)을 찍는다.
- 그 점에서 그래디언트를 구한다. (= 그 점에서 편미분계수를 구한다) 그래디언트의 반대방향으로 이동하며 이동폭은 \(\alpha\)로 조정한다. 따라서 업데이트하는 수식은 아래와 같다. \[\scriptsize [x_{sol},y_{sol}] \leftarrow \left[x_{sol} - \alpha \times \frac{f(x_{sol}+h,y_{sol})-f(x_{sol},y_{sol})}{h},y_{sol} - \alpha \times \frac{f(x_{sol},y_{sol}+h)-f(x_{sol},y_{sol})}{h}\right]\]
- 반복한다.
#

- 참고할만한 그림: \(\alpha=1.0\)이라면 각 점에서 화살표방향의 정확히 반대로 움직일 것이다. (ref: https://en.wikipedia.org/wiki/Gradient)
- 컬럼벡터를 이용하여 위으 수식을 간단히 표현하면 아래와 같다.
# 경사하강법 아이디어 (2차원) -- 근사
- 임의의 점 \((x_{sol},y_{sol})\)을 찍는다.
- 그 점에서 그래디언트를 구한다. (= 그 점에서 편미분계수를 구한다) 그래디언트의 반대방향으로 이동하며 이동폭은 \(\alpha\)로 조정한다. 따라서 업데이트하는 수식은 아래와 같다. \[\begin{bmatrix}x_{sol} \\ y_{sol}\end{bmatrix} \leftarrow \begin{bmatrix}x_{sol} - \alpha \times \frac{f(x_{sol}+h,y_{sol})-f(x_{sol},y_{sol})}{h} \\ y_{sol} - \alpha \times \frac{f(x_{sol},y_{sol}+h)-f(x_{sol},y_{sol})}{h}\end{bmatrix}\]
- 반복한다.
#
- 그래디언트를 이용하여 더 간결하게 표현하면 아래와 같다.
# 경사하강법 아이디어 (2차원)
- 임의의 점 \((x_{sol},y_{sol})\)을 찍는다.
- 그 점에서 그래디언트를 구한다. (= 그 점에서 편미분계수를 구한다) 그래디언트의 반대방향으로 이동하며 이동폭은 \(\alpha\)로 조정한다. 따라서 업데이트하는 수식은 아래와 같다. \[\begin{bmatrix}x_{sol} \\ y_{sol}\end{bmatrix} \leftarrow \begin{bmatrix}x_{sol} \\ y_{sol} \end{bmatrix} - \alpha \times \nabla f(x_{sol},y_{sol})\]
- 반복한다.
#
- 풀어보자.
def f(x,y):
return (x-2)**2 + (y-3)**2x_sol = 5
y_sol = 5
alpha = 0.1for dummy in range(5):
x_grad = (f(x_sol+0.01, y_sol) - f(x_sol,y_sol))/0.01
y_grad = (f(x_sol, y_sol+0.01) - f(x_sol,y_sol))/0.01
x_sol = x_sol - alpha * x_grad
y_sol = y_sol - alpha * y_grad
print(x_sol, y_sol)1.9950112430397957 2.995007501595604
1.9950089944318365 2.995006001276483
1.9950071955454691 2.9950048010211865
1.9950057564363752 2.995003840816949
1.9950046051491002 2.9950030726535593- 위의 알고리즘은 아래의 알고리즘과 다름을 주의하자.
# 경사하강법 아님
- 임의의 점 \((x_{sol},y_{sol})\)을 찍는다.
- 아래의 수식으로 업데이트한다.
- \(x_{sol} \leftarrow x_{sol} - \alpha \times \frac{f(x_{sol}+h,y_{sol})-f(x_{sol},y_{sol})}{h}\)
- \(y_{sol} \leftarrow y_{sol} - \alpha \times \frac{f(x_{sol},y_{sol}+h)-f(x_{sol},y_{sol})}{h}\)
- 반복한다.
#
위의 알고리즘에 대응하는 코드는 아래와 같음
for dummy in range(5):
x_grad = (f(x_sol+0.01, y_sol) - f(x_sol,y_sol))/0.01
x_sol = x_sol - alpha * x_grad
y_grad = (f(x_sol, y_sol+0.01) - f(x_sol,y_sol))/0.01
y_sol = y_sol - alpha * y_grad
print(x_sol, y_sol)4. 회귀분석
A. 아이스아메리카노
- 카페주인 박혜원씨는 온도와 아이스아메리카노 판매량이 관계가 있다는 사실을 알았음. 구체적으로는
“온도가 높아질수록 (=날씨가 더울수록) 아이스아메리카노 판매량이 증가”
한다는 사실을 알게되었다.
temp = [-2.4821, -2.3621, -1.9973, -1.6239, -1.4792, -1.4635, -1.4509, -1.4435,
-1.3722, -1.3079, -1.1904, -1.1092, -1.1054, -1.0875, -0.9469, -0.9319,
-0.8643, -0.7858, -0.7549, -0.7421, -0.6948, -0.6103, -0.5830, -0.5621,
-0.5506, -0.5058, -0.4806, -0.4738, -0.4710, -0.4676, -0.3874, -0.3719,
-0.3688, -0.3159, -0.2775, -0.2772, -0.2734, -0.2721, -0.2668, -0.2155,
-0.2000, -0.1816, -0.1708, -0.1565, -0.1448, -0.1361, -0.1057, -0.0603,
-0.0559, -0.0214, 0.0655, 0.0684, 0.1195, 0.1420, 0.1521, 0.1568,
0.2646, 0.2656, 0.3157, 0.3220, 0.3461, 0.3984, 0.4190, 0.5443,
0.5579, 0.5913, 0.6148, 0.6469, 0.6469, 0.6523, 0.6674, 0.7059,
0.7141, 0.7822, 0.8154, 0.8668, 0.9291, 0.9804, 0.9853, 0.9941,
1.0376, 1.0393, 1.0697, 1.1024, 1.1126, 1.1532, 1.2289, 1.3403,
1.3494, 1.4279, 1.4994, 1.5031, 1.5437, 1.6789, 2.0832, 2.2444,
2.3935, 2.6056, 2.6057, 2.6632]sales= [-8.5420, -6.5767, -5.9496, -4.4794, -4.2516, -3.1326, -4.0239, -4.1862,
-3.3403, -2.2027, -2.0262, -2.5619, -1.3353, -2.0466, -0.4664, -1.3513,
-1.6472, -0.1089, -0.3071, -0.6299, -0.0438, 0.4163, 0.4166, -0.0943,
0.2662, 0.4591, 0.8905, 0.8998, 0.6314, 1.3845, 0.8085, 1.2594,
1.1211, 1.9232, 1.0619, 1.3552, 2.1161, 1.1437, 1.6245, 1.7639,
1.6022, 1.7465, 0.9830, 1.7824, 2.1116, 2.8621, 2.1165, 1.5226,
2.5572, 2.8361, 3.3956, 2.0679, 2.8140, 3.4852, 3.6059, 2.5966,
2.8854, 3.9173, 3.6527, 4.1029, 4.3125, 3.4026, 3.2180, 4.5686,
4.3772, 4.3075, 4.4895, 4.4827, 5.3170, 5.4987, 5.4632, 6.0328,
5.2842, 5.0539, 5.4538, 6.0337, 5.7250, 5.7587, 6.2020, 6.5992,
6.4621, 6.5140, 6.6846, 7.3497, 8.0909, 7.0794, 6.8667, 7.4229,
7.2544, 7.1967, 9.5006, 9.0339, 7.4887, 9.0759, 11.0946, 10.3260,
12.2665, 13.0983, 12.5468, 13.8340]plt.plot(temp,sales,'o')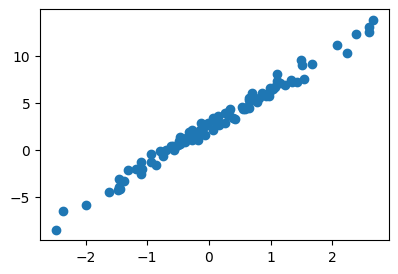
오늘 바깥의 온도가 0.5이다. 아이스아메리카노를 몇잔정도 만들어 두면 좋을까?
B. A의 자료를 만든 방법 (박혜원씨는 이걸 모름)
- 아래의 모형에서 \(y_i = \text{sales}_i\), \(x_i = \text{temp}_i\) 라고 생각하고 만들었음.
\[y_i = 2.5 + 4 x_i + \epsilon_i, i=1,2,\dots,n\]
torch.manual_seed(43052)
x = torch.randn(100).sort()[0]
eps = torch.randn(100)*0.5
y = 4*x + 2.5 + eps- 시각화
plt.plot(x,y,'o')
#plt.plot(x,4*x + 2.5,'--')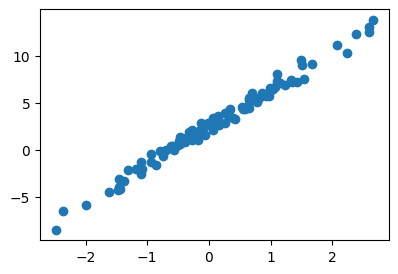
- 최규빈이 보는 그림과
- 박혜원씨가 보는 그림은 다르다.
C. 다시 박혜원씨의 세상으로
- 데이터를 다시 관찰하자.
plt.plot(temp,sales,'o')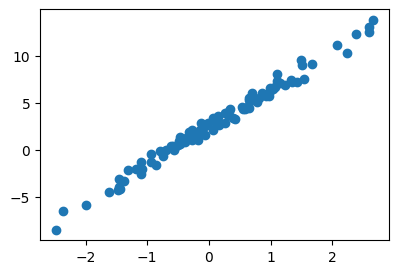
- 박혜원씨의 의심: 이 세상이 혹시 시뮬레이션 아니야???
- 내가 관측한
sales가 \(\text{sales}_i = \beta_0 + \beta_1 \text{temp}_{i} + \epsilon_i, \epsilon_i \sim \overset{i.i.d}{\sim} N(0,??)\) 에서 얻어진 것 같아.. - 증거?? 그냥 느낌이 그래.. (그림을 딱보니까 그냥 느낌이 그래) <— 검증이 필요함 (잔차분석)
- 박혜원씨의 생각: 앞으로 이 세상은 시뮬레이션이라고 가정하자.
- 본질적으로
sales하고temp사이에는 직선의 관계가 있어야 한다. (\(x_i,y_i\)가 선형성을 가짐) - 그런데 왜 그림을 그려보면 “정확한”직선으로 보이지 않냐??? 누군가가 각 관측치에 장난질을 쳐서 본질을 흐리고 있기 때문이다.
- 나는 장난질에 흔들리지 않고 본질을 꿰뚫어 보겠다. (즉 파란점들을 적당히 잘 관통하는 직선을 찾겠다) 그래서 커피판매량을 잘 예측해서 부자가 되는 것이 목표이다.
- 본질을 꿰뚫어 봄 = \((x_i, y_i)\)를 “적당히 잘 관통하는 하나의 추세선”을 그리는 것 = 최~~~~대한 \(y_i \approx \beta_0 + \beta_1 x_i\) 를 만족하도록 \(\beta_0,\beta_1\)을 잘 선택하는 것.
# 박혜원씨의 시도1 – 혹시.. \([\beta_0, \beta_1] = [-5, 10]\) 아니야??
plt.plot(x,y,'o')
plt.plot(x,-5+10*x, '--')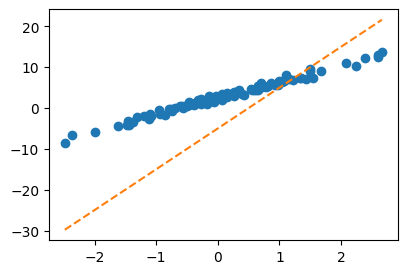
- 박혜원씨의 생각: 이게 아니네..
- 우리의 생각: 그래 그거 아니야.. 사실 진짜값은 \([\beta_0,\beta_1] = [2.5, 4]\) 이거든!!
#
# 박혜원씨의 시도2 – 혹시.. \([\beta_0, \beta_1] = [2.5, 3.5]\) 아니야??
plt.plot(x,y,'o')
plt.plot(x,2.5+3.5*x, '--')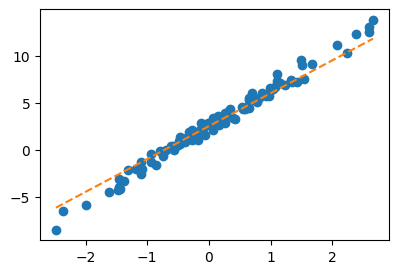
- 박혜원씨의 생각: 이거는 첫번째 보다 상당히 그럴듯한데??
- 우리의 생각: 와 맞아.. 거의 다 왔어.. 더 힘내.. 사실 진짜값은 \([\beta_0,\beta_1] = [2.5, 4]\) 이거든!!
#
# 박혜원씨의 시도3 – 혹시.. \([\beta_0, \beta_1] = [2.3, 3.5]\) 아니야??
plt.plot(x,y,'o')
plt.plot(x,2.3+3.5*x, '--')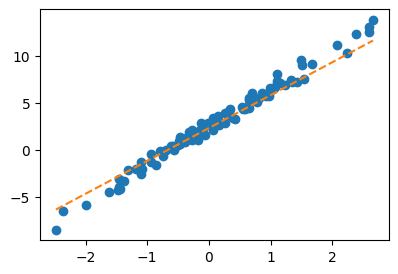
- 박혜원씨의 생각: 이게 더 그럴듯한가?? 아니면 아까 그게 더 그럴듯한가??
- 우리의 생각: 아니야.. 아까것이 더 좋은가야.. 사실 진짜값은 \([\beta_0,\beta_1] = [2.5, 4]\) 이거든!!
#
- 솔직히 박혜원씨 입장에서는 시도2랑 시도3중에 뭐가 더 “적당한 직선”인지 구분하는게 어렵지 않나?? \(\to\) “적당함”을 수식화할 필요가 있겠다.
- “적당한 정도”를 판단하는 장치: loss의 개념 도입
\[loss =\sum_{i=1}^{n}\big(y_i -(\beta_0 + \beta_1x_i)\big)^2\]
회귀분석에서는 위 수식을 SSE라고 하죠
- 여기에서 \(y_i\)는 파란색을 의미
- 또한 \(\beta_0 + \beta_1 x_i\)는 주황색을 의미
- loss는 모든 \(i\)에 대하여 대체로 \(y_i \approx \beta_0 + \beta_1 x_i\)일수록 그 값이 작아짐..
- loss는 주황색이 대체로 파란색과 비슷해질수록 그 값이 작음.
- loss를 써먹어보자.
# 시도2
b0 = 2.5
b1 = 3.5
loss = torch.sum((y-(b0 + b1*x))**2)
print(loss)tensor(55.0740)# 시도3
b0 = 2.3
b1 = 3.5
loss = torch.sum((y-(b0 + b1*x))**2)
print(loss)tensor(59.3805)- 박혜원씨 생각: 아… 시도2가 더 좋았구나..
- 우리의 생각: 그래 맞아~~ 시도2가 더 좋다니까?? (진짜 값이 \([\beta_0,\beta_1] = [2.5, 4]\) 이거든)
- 정리
- 박혜원씨 관점에서는 온도를 알면 커피판매량을 잘 예측하고 싶음.
- 1을 위해서는 최대한 \(y_i \approx \beta_0 + \beta_1 x_i\)이 되도록 하는 \(\beta_0, \beta_1\)을 찾아야함.
- 2를 위해서는 \(loss\)를 가장 작게 만드는 \(\beta_0,\beta_1\)의 값을 찾으면 됨.
그런데 결국 loss는 \(\beta_0,\beta_1\)의 값을 입력으로 주면 출력으로 하나의 값을 주는 함수라고 볼 수 있음.
- 결국 정리하면 \(f(x,y)\)를 최소로 만드는 \(x,y\)를 찾는 최적화문제와 동일하게 된다. (그런데 우리는 이런걸 잘해요)
def l(b0,b1):
return torch.sum((y-(b0 + b1*x))**2)# plot_surface_3d(l) # -- 그림을 그려보니까 "아래로 볼록하네?"b0 = -5
b1 = 10alpha = 0.001
b0_grad = (l(b0+0.001,b1) - l(b0,b1))/0.001
b1_grad = (l(b0,b1+0.001) - l(b0,b1))/0.001
b0 = b0 - alpha * b0_grad
b1 = b1 - alpha * b1_gradplt.plot(x,y,'o')
plt.plot(x,b0+b1*x,'--')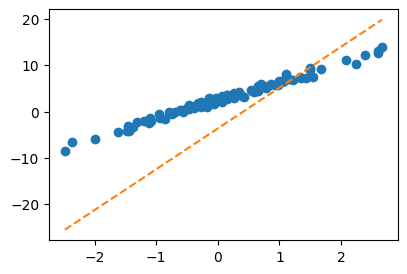
- 수렴과정확인
Code
plt.rcParams['figure.figsize'] = (7.5,2.5)
plt.rcParams["animation.html"] = "jshtml"
def make_ani2(alpha=0.001):
## 1. 히스토리 기록을 위한 list 초기화
loss_history = []
yhat_history = []
b0_history = []
b1_history = []
## 2. 학습 + 학습과정기록
b0 = -5.0
b1 = 10.0
b0_history.append(b0)
b1_history.append(b1)
for epoc in range(30):
yhat = b0 + b1*x
yhat_history.append(yhat.tolist())
loss = torch.sum((y - yhat)**2)
loss_history.append(loss.item())
b0_grad = (l(b0+0.01, b1) - l(b0, b1)) / 0.01
b1_grad = (l(b0, b1+0.01) - l(b0, b1)) / 0.01
b0 = b0 - alpha * b0_grad
b1 = b1 - alpha * b1_grad
b0_history.append(b0)
b1_history.append(b1)
## 3. 시각화
fig = plt.figure()
ax1 = fig.add_subplot(1, 2, 1)
ax2 = fig.add_subplot(1, 2, 2, projection='3d')
#### ax1: yhat의 관점에서..
ax1.plot(x, y, 'o')
line, = ax1.plot(x, yhat_history[0])
#### ax2: loss의 관점에서..
import numpy as np
w0 = np.arange(-6, 11, 0.5)
w1 = np.arange(-6, 11, 0.5)
W1, W0 = np.meshgrid(w1, w0)
LOSS = W0 * 0
for i in range(len(w0)):
for j in range(len(w1)):
LOSS[i,j] = torch.sum((y - w0[i] - w1[j]*x)**2)
ax2.plot_surface(W0, W1, LOSS, rstride=1, cstride=1, color='k', alpha=0.1)
ax2.azim = 30
ax2.dist = 8
ax2.elev = 5
ax2.set_xlabel(r'$\beta_0$')
ax2.set_ylabel(r'$\beta_1$')
ax2.set_xticks([-5, 0, 5, 10])
ax2.set_yticks([-5, 0, 5, 10])
ax2.scatter(-5, 10, l(-5, 10), s=200, marker='*', color='C1')
def animate(epoc):
line.set_ydata(yhat_history[epoc])
ax2.scatter(b0_history[epoc], b1_history[epoc], loss_history[epoc], color='C1',alpha=0.5)
fig.suptitle(f'alpha = {alpha} / epoch = {epoc}')
return [line]
ani = matplotlib.animation.FuncAnimation(
fig, animate, frames=30, blit=False, repeat=True
)
plt.close()
return animake_ani2(0.001)